
Le funzionalità di rilevamento della profondità di Apple Car potrebbero non essere limitate al solo LiDAR, con Apple che, attraverso un nuovo brevetto, suggerisce che il veicolo potrebbe utilizzare una telecamera ad infrarossiin grado di rilevare ostacoli stradali.
Tra le molte sfide della creazione di un veicolo a guida autonoma, probabilmente la più grande è quella di ottenere un sistema in grado di ottenere i dati dalla strada stessa. Esistono una miriade di sensori e sistemi disponibili da utilizzare, sebbene con notevoli variazioni in termini di accuratezza, costi e requisiti fisici.
Ad esempio, LiDAR è una tecnologia utile per il rilevamento della profondità, ma è ancora relativamente costosa da impiegare a causa delle parti coinvolte. Sfruttando i componenti più economici in un sistema diverso, Apple potrebbe avvicinarsi in modo fattibile alla precisione di LiDAR senza troppe spese.
In un brevetto concesso ad Apple dall’Ufficio brevetti e marchi degli Stati Uniti intitolato “Telerilevamento per il rilevamento e la gamma di oggetti“, Apple suggerisce un sistema costituito da una sorgente di luce controllabile, circuiti di temporizzazione ed un circuito o processore per rilevare la distanza.
Il telerilevamento, in cui i dati riguardanti un oggetto vengono acquisiti utilizzando dispositivi di rilevamento non a contatto fisico con l’oggetto, è stato applicato in molti contesti diversi, come ad esempio l’imaging satellitare delle superfici planetarie, l’imaging geologico delle caratteristiche del sottosuolo, le previsioni meteorologiche e imaging medico dell’anatomia umana.
Il telerilevamento può quindi essere realizzato utilizzando una varietà di tecnologie, a seconda dell’oggetto da rilevare, del tipo di dati da acquisire, dell’ambiente in cui si trova l’oggetto e di altri fattori.
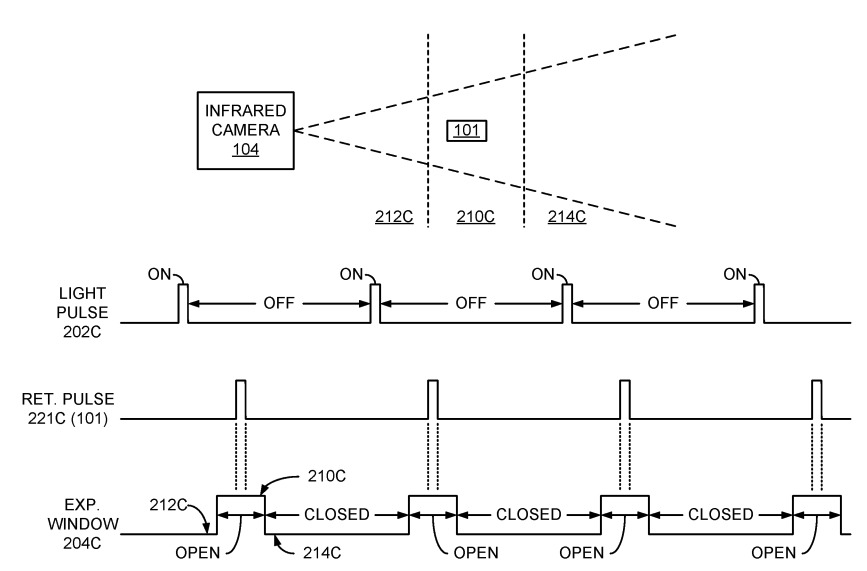
L’invenzione di Apple prevede sistemi e metodi per il telerilevamento di oggetti. Ad esempio, il telerilevamento viene eseguito utilizzando una videocamera (ad esempio una videocamera a infrarossi) e una sorgente di luce associata, in cui una finestra di esposizione per la videocamera è temporizzata in relazione all’impulso della sorgente di luce per migliorare le informazioni di portata prodotte.
Il sistema descritto nel brevetto, potrebbe essere utilizzato insieme ad una configurazione LiDAR, per creare un sistema ibrido in grado di rilevare oggetti con diversi livelli di precisione. L’impostazione della telecamera ad impulsi luminosi di precisione inferiore descritta nel brevetto potrebbe essere utilizzata per generare aree di interesse per il sistema autonomo del veicolo, che può quindi informare su dove l’elemento LiDAR dovrebbe concentrare i suoi sforzi di scansione.
Cosa ne pensate?

Leggi o Aggiungi Commenti